Arduino常用元器件模块使用教程


***********************************
示例Mixly程序下载方式,关注微信公众号回复“示例程序”
***********************************
交通灯模块

技术参数:
尺寸:56*21*11mm
颜色:红 黄 绿
LED:5mm *3
亮度:普通亮度
电压:5V
输入:数字信号输出
接口:共阴极 红黄绿单独控制
模块接口说明:
1 .GND 外接GND
2.R 红色LED灯正极接口,接开发板引脚
3. Y 黄色LED灯正极接口,接开发板引脚
4. G 绿色LED灯正极接口,接开发板引脚
模拟交通灯,将交通灯需要用到红、黄、绿三个颜色的LED灯整合在一起,内置限流电阻,工作电压5V。
测试程序:
模拟设计一个交通灯,每隔5秒变化颜色。
接线图
交通灯模块 | UNO开发板 |
GND | GND |
R | 2 |
Y | 3 |
G | 4 |

【Mixly图形化编程例程】

编程完成后选择开发板“Arduino/Grduino UNO”,选择COM端口,点击上传。
上传成功后观察交通灯的变化。

全彩LED灯模块 (KY-009)

技术参数:
供电电压: 5V DC
输入:数字信号输出
接口:共阴极 红绿蓝单独控制
模块接口说明:
1 .- 外接GND
2.R 红色LED灯正极接口,接开发板引脚
3. G 绿色LED灯正极接口,接开发板引脚
4. B 蓝色LED灯正极接口,接开发板引脚
RGB LED模块由一个贴片全彩LED制成,通过R、G、B三个引脚的PWM电压输入可以调节三种基色(红/蓝/绿)的强度从而实现全彩的混色效果。用Arduino对模块的控制可实现酷炫的灯光效果.
测试程序:
利用PWM电压输入调节三种基色(红/蓝/绿)的强度从而实现全彩的混色效果。三色亮度随机,每两秒钟更新一种混色
接线图
全彩LED模块 | UNO开发板 |
- | GND |
R | 3 |
G | 5 |
B | 6 |

【Mixly图形化编程例程】

编程完成后选择开发板“Arduino/Grduino UNO”,选择COM端口,点击上传。
上传成功后查看模块变化。
———————————————————————
蜂鸣器

技术参数:
供电电压: 3.3-5V DC
尺寸: 2.8cm * 1.3cm
模块接口说明:
1 .GND 外接GND
2. I/O 信号输入接口,接开发板引脚
3. VCC 外接5V
有源蜂鸣器注意,这里的“源”不是指电源。而是指震荡源。有源蜂鸣器的特点是:内部带震荡源,所以只要一通电就会鸣响;程序控制方便,单片机一个高低电平就可以让其发出声音,而无源蜂鸣器却做不到。该模块为低电平触发,也就是当I/O口接收的低电平时蜂鸣器才鸣响。
测试程序:
蜂鸣器隔一秒鸣响一下。
接线图
蜂鸣器 | UNO开发板 |
GND | GND |
I/O | 2 |
VCC | 5V |

【Mixly图形化编程例程】

编程完成后选择开发板“Arduino/Grduino UNO”,选择COM端口,点击上传。
上传成功后听蜂鸣器的变化。
—————————————————————————————
MG90S舵机

技术参数:
供电电压: 3.3-5V DC
重量:13.6g
尺寸:22.8*12.2*28.5mm
扭力:2.0kg(4.8v)
速度:0.11s(4.8v)
角度:0-180°
舵机类型:模拟舵机
使用温度:0°-55°
死区设定:5微秒
模块接口说明:
1 .棕色线 外接GND
2.红色线 外接5V
3.黄色线 信号输入接口,接开发板PWM功能引脚
舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。在遥控玩具,如飞机、潜艇模型,遥控机器人中已经得到了普遍应用。在Arduino应用中它可以非常方便的控制转动角度。
测试程序:
从0°开始,每隔500毫秒旋转10°,直到旋转至180°。
接线图
舵机 | UNO开发板 |
棕色 | GND |
红色 | 5V |
黄色 | 3 |

【Mixly图形化编程例程】

编程完成后选择开发板“Arduino/Grduino UNO”,选择COM端口,点击上传。
上传成功后观察舵机运动情况。
————————————————————————
红外遥控器

技术参数:
电池: 内置3V扣式电池 (CR2025)
尺寸:86*40*6.0mm
遥控范围:8米以内(红外接收头本身质量,中间有无障碍物等因素会影响到遥控距离)
红外载波频率:38KHz
面贴材料:0.125mmPET
有效寿命:2万次以上
使用说明:
使用时需要将遥控器尾端的电池隔片抽出。(如右图所示)

遥控器采用标准的38K调制频率,可适用市面上各种红外接收头,可方便应用于各种遥控使用场景。
————————————————————————
红外接收模块

技术参数:
供电电压: 2.7-5.5V DC
频率:37.9KHZ,
接收距离:18米.采用内
模块接口说明:
1 .- 外接GND
2. 外接5V
3.S 信号输入接口,接开发板引脚
红外接收模块采用的是1838红外接收头这款是通用型,带铁壳,可弯脚,采用内、外双屏蔽封装结构,抗光、电磁干扰能力强,内置红外线专用IC,能在500LUX光线强度下正常工作。广泛应用于:音响、电视、录影机、碟机、机顶盒、数码相框、车载音响、遥控玩具、卫星接收器、硬盘播放器、冷气机、暖风机、电风扇、灯饰等家用电器。
测试程序:
接收红外遥控器的红外编码信号,并从串口输出。
接线图
红外接收模块 | UNO开发板 |
- | GND |
5V | |
S | 3 |
【Mixly图形化编程例程】

编程完成后选择开发板“Arduino/Grduino UNO”,选择COM端口,点击上传。
上传成功后打开串口监视器,使用红外遥控器对准接收模块按下按钮,查看串口监视器的数据变化。
——————————————————————
LCD液晶屏1602

技术参数:
供电电压: 3.3-5V DC
尺寸: 80cm * 36cm
模块接口说明:
1 .GND 外接GND
2.VCC 外接5V
3.SDA 信号输入接口,接开发板SDA引脚
4.SCL 信号输入接口,接开发板SCL引脚
LCD1602液晶显示器是广泛使用的一种字符型液晶显示模块。它是由字符型液晶显示屏(LCD)、控制驱动主电路HD44780及其扩展驱动电路HD44100,以及少量电阻、电容元件和结构件等装配在PCB板上而组成。
1602液晶屏,arduino专用IIC总线控制,只占用2个IO。对比度可调(调节蓝色旋钮),背光灯可控,蓝底白字屏。用于显示数据。

测试程序:
液晶屏每隔一秒钟显示一段文字。
接线图
液晶屏 | UNO开发板 |
GND | GND |
VCC | 5V |
SDA | SDA |
SCl | SCl |

【Mixly图形化编程例程】

编程完成后选择开发板“Arduino/Grduino UNO”,选择COM端口,点击上传。
上传成功后观察液晶屏的显示。
注意:如果发现屏幕上没有文字,可以旋转背后的蓝色旋钮调节对比度。

————————————————————————
四位数码管模块

技术参数:
供电电压: 3.3-5V DC
尺寸: 2.8cm * 1.3cm
模块接口说明:
1 .CLK 信号输入接口,接开发板引脚
2.DIO 信号输入接口,接开发板引脚
3.VCC 外接5V
4.GND 外接GND
四位数码管显示模块 LED亮度可调,带时钟点,该模块是一个12脚的带时钟点的四位共阳数码管(0.36英寸)的显示模块,驱动芯片为TM1637,只需2根信号线即可使单片机控制四位8段数码管。
测试程序:
利用模块显示一个时间数值。
接线图
四位数码管模块 | UNO开发板 |
GND | GND |
VCC | 5V |
DIO | 2 |
CLK | 3 |

【Mixly图形化编程例程】

编程完成后选择开发板“Arduino/Grduino UNO”,选择COM端口,点击上传。
上传成功后观察显示模块。
————————————————————————-
摇杆

技术参数:
尺寸: 34*26*32mm
模块接口说明:
1 .GND 外接GND
2.+5 外接5V
3.VRX 信号输出接口(X轴),接开发板引脚
4.VRY 信号输出接口(Y轴),接开发板引脚
5.SW 信号输出接口(按钮),接开发板引脚(默认高电平)
摇杆摇杆模块,电子积木标准接口及2.54mm插针 接口引出。十字摇杆为一个双向的10K电阻器,随着摇杆方向不同,抽头的阻值随着变化。另外摇杆还设有按钮,当被按下时SW引脚输出低电平,放开按钮SW引脚为高电平。
测试程序:
将推动遥杆将其两轴的数值变化显示到串口监视器上。
接线图
摇杆 | UNO开发板 |
GND | GND |
+5 | 5V |
VRX | A0 |
VRX | A2 |
SW |

【Mixly图形化编程例程】

编程完成后选择开发板“Arduino/Grduino UNO”,选择COM端口,点击上传。
上传成功后,推动摇杆观察串口监视器上X、Y两轴的数值变化。
——————————————————————————————
步进电机及驱动器

技术参数:
减速步进电机(28BYJ-48)
直径:28mm
电压:5V
步进角度:5.625 x 1/64
减速比:1/64
单个重:0.04KG
步进电机驱动器(ULN2003)
逻辑电平:5V
基极输入最大电流:25mA
输出外接最大电压12V
模块接口说明:
1 .IN1 信号输入接口,接开发板引脚
2.IN2 信号输入接口,接开发板引脚
3.IN3 信号输入接口,接开发板引脚
4.IN4 信号输入接口,接开发板引脚
5.- 电源负极接入接口,外接电源负极
6.+ 电源正极接入接口,外接电源正极
应用范围:主要用于房间空调器分体系列室内机导风板、暖风器导风板、移动空调、壁炉、便洁宝和各种智能气阀(燃气热水器、燃气灶等)。
测试程序:
让电机以规定速度旋转。
接线图
ULN2003 | UNO开发板 |
IN1 | 2 |
IN2 | 3 |
IN3 | 4 |
IN4 | 5 |
- | GND |
+ | 5V |

【Mixly图形化编程例程】

编程完成后选择开发板“Arduino/Grduino UNO”,选择COM端口,点击上传。
上传成功后观察步进电机。
————————————————————————————
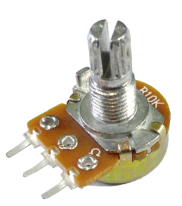
电位器
技术参数:
可调电阻值: 0-10K欧
模块接口说明:
三个引脚,两端连接这为最大电阻,中间引脚为旋转可变电阻。
位器是具有三个引出端、阻值可按某种变化规律调节的电阻元件。电位器通常由电阻体和可移动的电刷组成。当电刷沿电阻体移动时,在输出端即获得与位移量成一定关系的电阻值或电压。电位器既可作三端元件使用也可作二端元件使用。后者可视作一可变电阻器,由于它在电路中的作用是获得与输入电压(外加电压)成一定关系的输出电压,因此称之为电位器。
测试程序:
旋转编码器通过串口监视器查看数值变化。
接线图

【Mixly图形化编程例程】

编程完成后选择开发板“Arduino/Grduino UNO”,选择COM端口,点击上传。
上传成功后旋转电位器观察串口监视器上的数值变化。
——————————————————————————
继电器

技术参数:
供电电压: 5V DC
本模块5V继电器,低电平触发,可以控制220V 10A交流负载
模块接口说明:
1 .NI 信号输入接口,接开发板引脚
2.GND 外接GND
3.VCC 外接5V
4.公共端
5.常开
6.常闭
继电器是一种电控制器件,是当输入量(激励量)的变化达到规定要求时,在电气输出电路中使被控量发生预定的阶跃变化的一种电器。它具有控制系统(又称输入回路)和被控制系统(又称输出回路)之间的互动关系。通常应用于自动化的控制电路中,它实际上是用小电流去控制大电流运作的一种“自动开关”。故在电路中起着自动调节、安全保护、转换电路等作用。
测试程序:
通过继电器控制电机启动5秒,停止2秒。
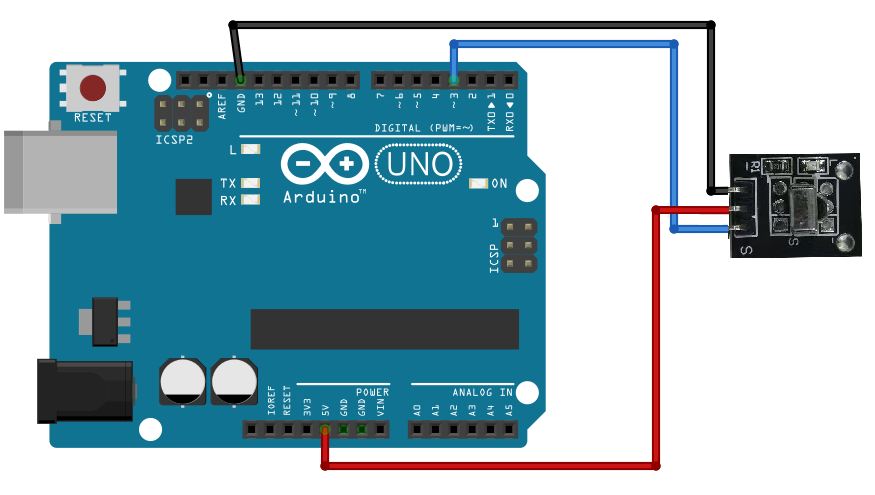
接线图
继电器 | UNO开发板 |
GND | GND |
VCC | 5V |
IN | 2 |

【Mixly图形化编程例程】

编程完成后选择开发板“Arduino/Grduino UNO”,选择COM端口,点击上传。
上传成功后观察电机的变化。